function PendulumOnCartDynamicalModel()
dPi_2 = sym(pi/2);
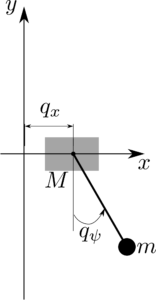
% Pendulum Length
syms dL real
oPendulum = SymRobot('PendulumOnCart');
oPendulum.AddToTip(SymRobotNodeRotoTranslation(LibMath.RotY(dPi_2), [0;0;0]));
% Linear Displacement of the CART is a Linear Joint
oPendulum.AddToTip(SymRobotNodeJointLin(0.0, 'X'));
% Add a Label for the CART
oPendulum.AddToTip(SymRobotNodeRotoTranslation(LibMath.RotY(-dPi_2), [0;0;0],'CART'));
oPendulum.AddToTip(SymRobotNodeRotoTranslation(LibMath.RotX(dPi_2), [0;0;0]));
oPendulum.AddToTip(SymRobotNodeRotoTranslation(LibMath.RotZ(-dPi_2), [0;0;0]));
% Angular Displacement of the MASS is a Rotational Joint
oPendulum.AddToTip(SymRobotNodeJointRot(0.0, 'PSI'));
% Add a Label for the CART
oPendulum.AddToTip(SymRobotNodeRotoTranslation(eye(3), [dL;0;0], 'TIP'));
% Joint states and derivatives
sQ = oPendulum.GetJointSymVariables('q');
sQdot = oPendulum.GetJointSymVariables('q_dot');
sQddot = oPendulum.GetJointSymVariables('q_ddot');
% Masses of the components: M is CART, m is TIP
% Gravity and direction
syms M m g0 real
gn = [0;0;-1]*g0;
oCart = oPendulum.GetNode('CART');
oTip = oPendulum.GetNode('TIP');
% Compute the Lagrangian function: T-U as the difference between
% Kinetic and Potential Energy
Lagrangian = simplify(...
oCart.Lagrangian(sQ, sQdot, M, zeros(3), gn) + ...
oTip.Lagrangian(sQ, sQdot, m, zeros(3), gn));
% Get the Dynamical Model:
% sQddot = B^-1*(-C*sQdot-g);
[B, C, g, ~] = SymRobot.LagrangianModel(sQ, sQdot, sQddot, Lagrangian)
end